Description
Typical consumer-grade RGB-D cameras are provided with a coarse intrinsic and extrinsic calibration that generally does not meet the accuracy requirements needed by many robotics applications. Our calibration approach is based on a novel, two components, measurement error model that unifies the error sources of different RGB-D pairs based on different technologies, such as structured-light 3D cameras and time-of-flight cameras. The proposed correction model is implemented using two different parametric undistortion maps that provide the calibrated readings by means of linear combinations of control functions. A non-linear optimization algorithm refines the camera-depth sensor rigid displacement along with the aforementioned parametric maps in a single optimization step guaranteeing highly reliable results.
Software
The code is available on GitHub under a BSD license and is specifically developed for ROS Indigo.
Main dependencies:
Results
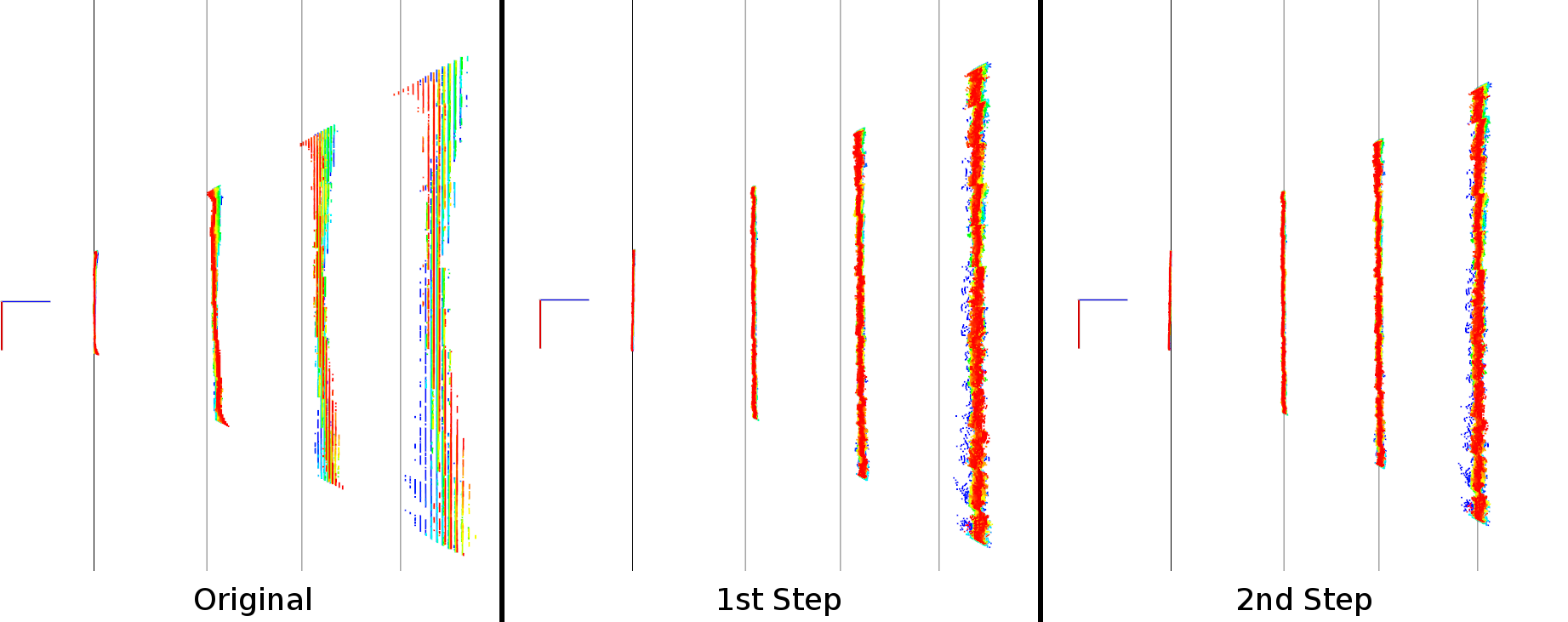
Depth Correction
Results of the calibration applied to a set of clouds of a wall at different distances.
RGB-Depth Registration
Resulting RGB-Depth registration using default calibration parameters compared to the RGB-Depth registration after the calibration procedure.


Visual Odometry
Qualitative results of visual odometry experiments on original and calibrated data. The estimated path (first column) and the clouds reconstructed using the original distorted data and the corrected ones (second and third column respectively) are compared.
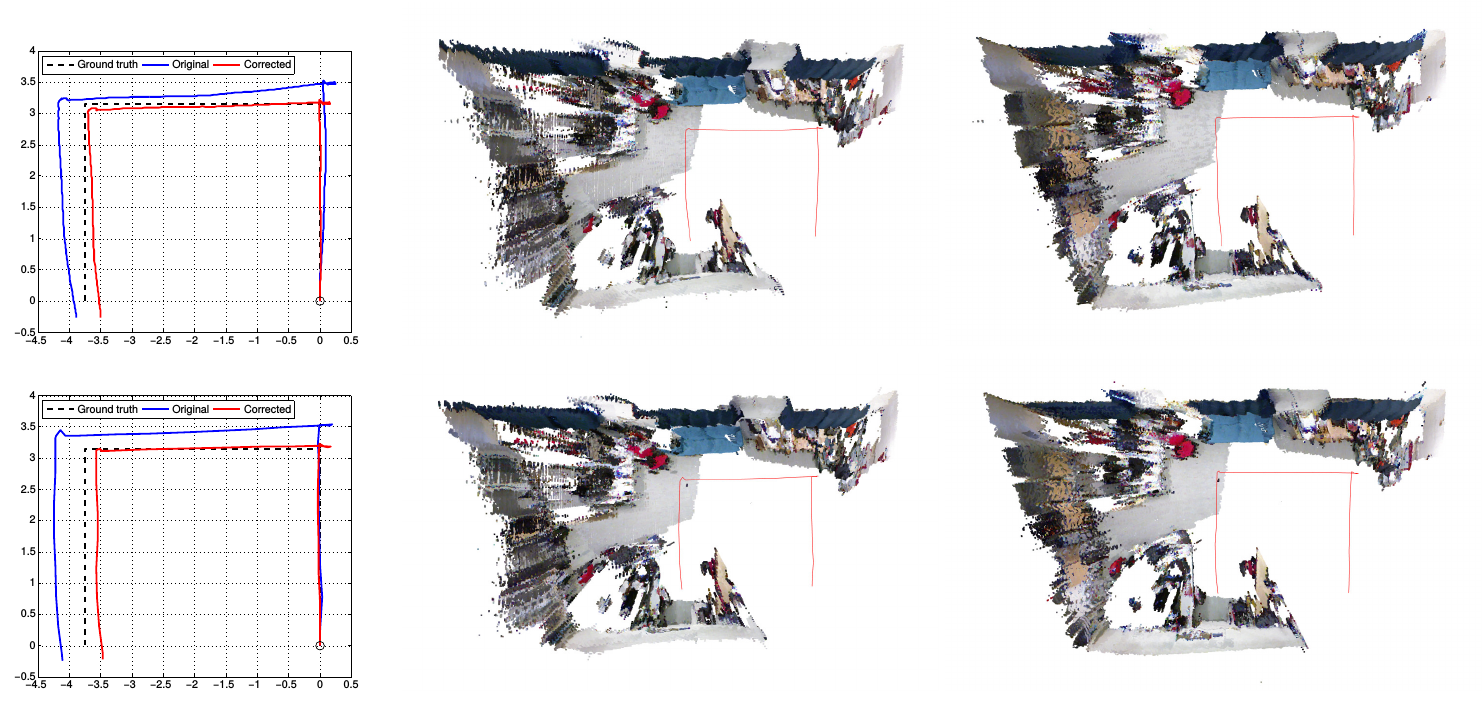
First row: results obtained from DVO, a state-of-the-art software. Second row: results obtained from OFVO, a simpler approach developed just for testing purposes.
Publications
- Robust Intrinsic and Extrinsic Calibration of RGB-D Cameras, Filippo Basso, Emanuele Menegatti and Alberto Pretto, 2017. [ArXiv preprint] [BibTeX]
- A non-parametric Calibration Algorithm for Depth Sensors Exploiting RGB Cameras, Filippo Basso, Ph.D. Thesis, 2015. [Padua@research] [BibTeX]
- Unsupervised Intrinsic and Extrinsic Calibration of a Camera-Depth Sensor Couple, Filippo Basso, Alberto Pretto and Emanuele Menegatti, Robotics and Automation (ICRA), 2014 IEEE International Conference on. [Obsolete] [IEEEXplore] [BibTeX]